|
I am a research scientist in the Spatial AI Lab of Microsoft in Zurich. Prior joining Microsoft, I did my bachelor at Ecole polytechnique in Paris and my master in Computer Science at ETH Zurich. I then conducted my PhD thesis in the Computer Vision and Geometry (CVG) group at ETH Zurich under the supervision of Prof. Dr. Marc Pollefeys. I also collaborated with and interned at Meta Reality Labs, Leica Geosystems, INRIA Nancy - Grand Est, and MetraLabs. Email / CV / Google Scholar / Github / LinkedIn |

|
|
I am interested in Computer Vision, Robotics and Deep Learning in general. My research focuses on local feature detection and description based on deep learning, and their applications to visual localization and sparse 3D reconstruction. |

|
Lei Li, Songyou Peng, Zehao Yu, Shaohui Liu, Rémi Pautrat, Xiaochuan Yin, Marc Pollefeys, Conference on Computer Vision and Pattern Recognition (CVPR), 2024 project page / video / code / arXiv A learned approach to estimate an edge density and extract 3D edges from a scene. |
|
Petr Hruby, Shaohui Liu, Rémi Pautrat, Marc Pollefeys, Dániel Béla Baráth, International Conference on 3D Vision (3DV), 2024 (Spotlight) arXiv A complete classification of all solvers for relative pose estimation based on point and line correspondences. |

|
Rémi Pautrat*, Iago Suárez*, Yifan Yu, Marc Pollefeys, Viktor Larsson, International Conference on Computer Vision (ICCV), 2023 project page / code / arXiv A joint point-line matcher with graph neural networks. |
|
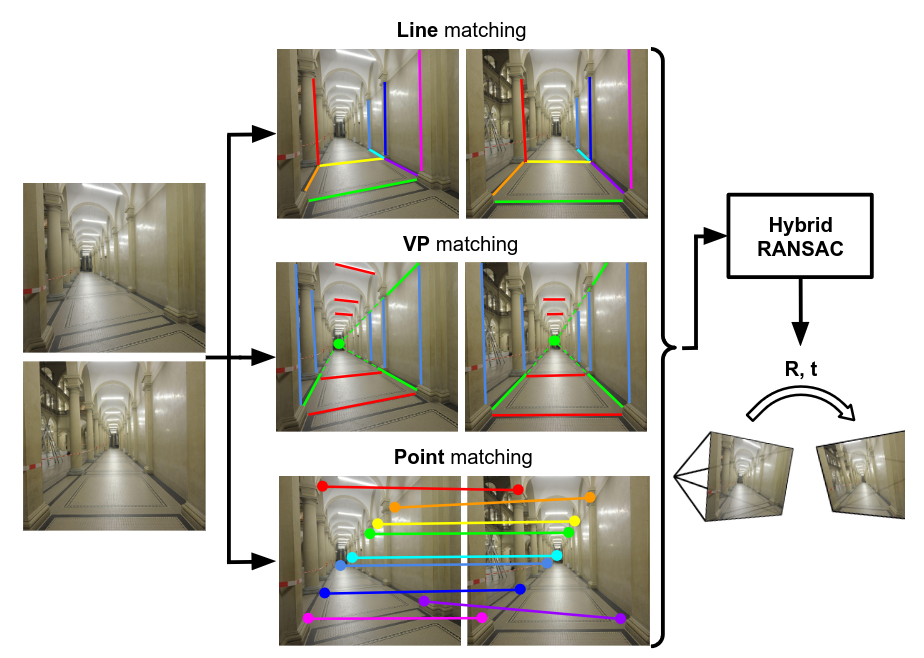
Rémi Pautrat, Shaohui Liu, Petr Hruby, Marc Pollefeys, Dániel Béla Baráth, International Conference on Computer Vision (ICCV), 2023 project page / code / arXiv Solvers to extract the 3 orthogonal vanishing points of an uncalibrated image (i.e. unknown focal length), given a prior on the gravity direction. |

|
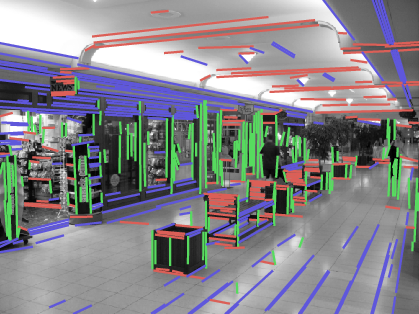
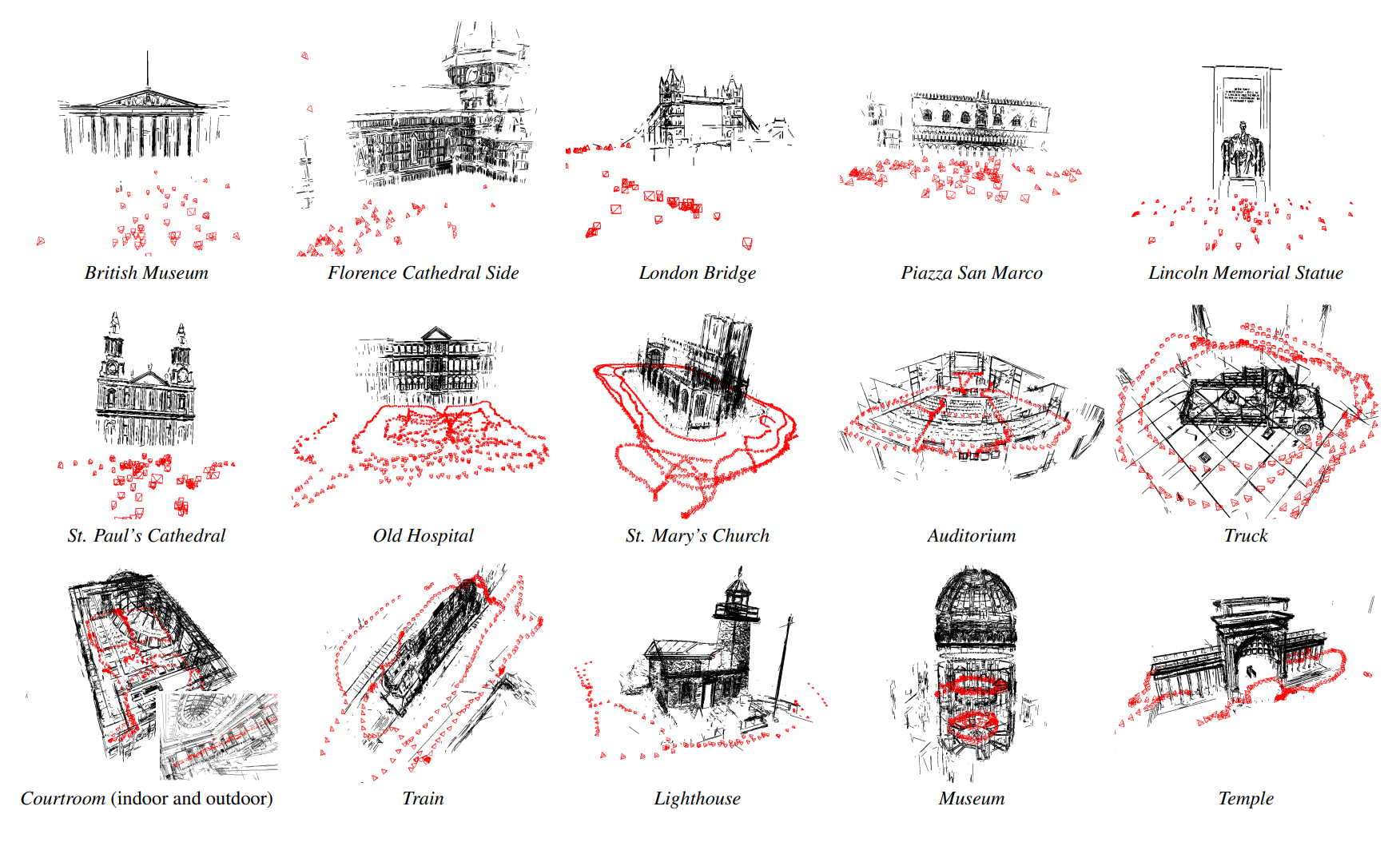
Shaohui Liu, Yifan Yu, Rémi Pautrat, Marc Pollefeys, Viktor Larsson, Computer Vision and Pattern Recognition (CVPR), 2023 (Highlight) project page / code / arXiv An open-sourced system that robustly and efficiently constructs 3D line maps from multi-view images. |
|
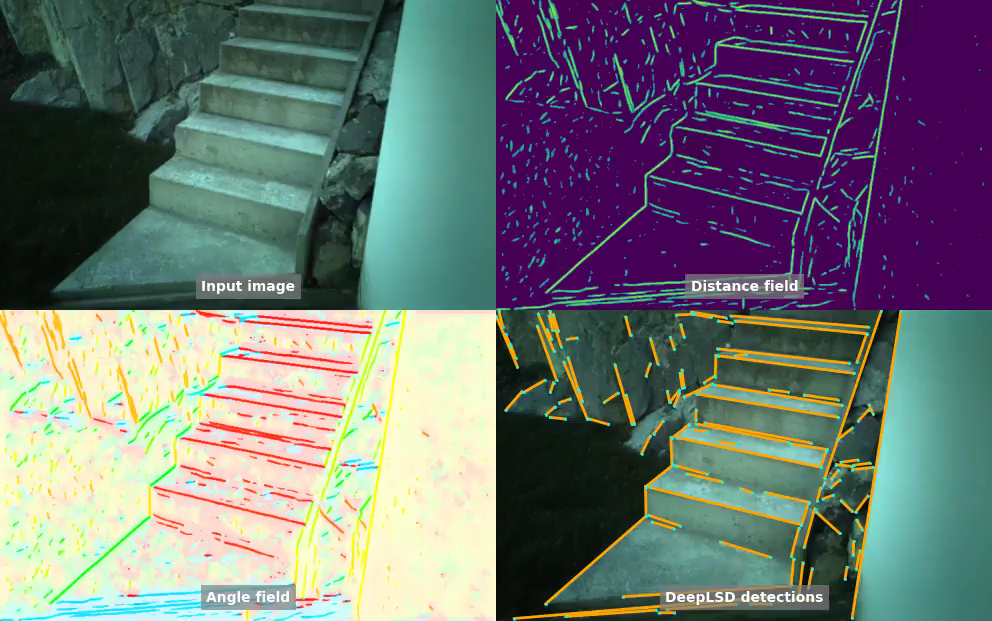
Rémi Pautrat, Dániel Béla Baráth, Viktor Larsson, Martin R. Oswald, Marc Pollefeys, Computer Vision and Pattern Recognition (CVPR), 2023 project page / video / code / arXiv A generic line detector that combines the robustness of deep learning with the accuracy of handcrafted detectors. |
|
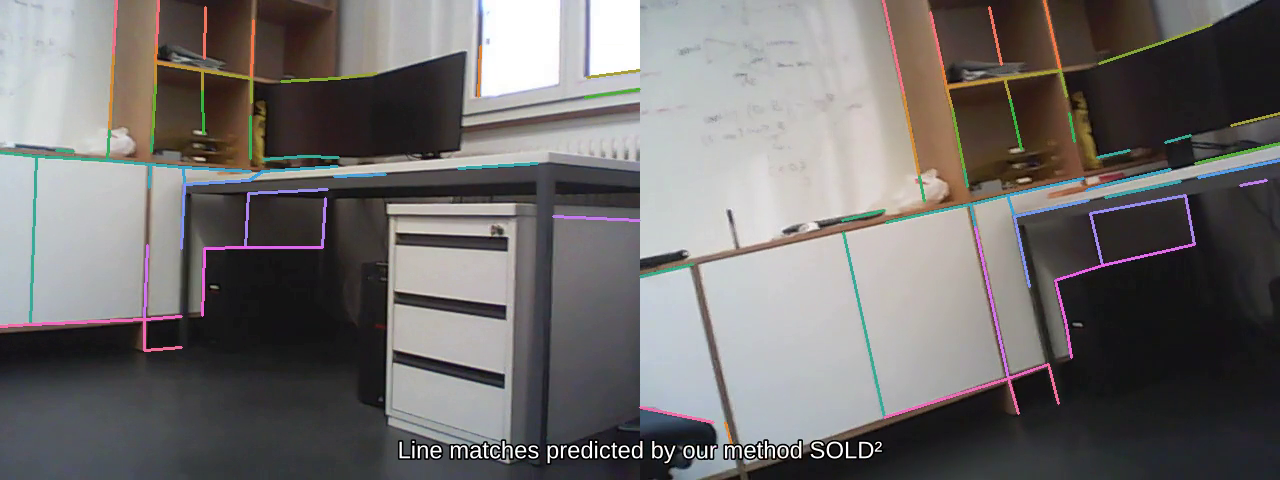
Rémi Pautrat*, Juan-Ting Lin*, Viktor Larsson, Martin R. Oswald, Marc Pollefeys, Computer Vision and Pattern Recognition (CVPR), 2021 (Oral) project page / video / code / arXiv A deep line detector and descriptor able to match line segments partially occluded. |
|
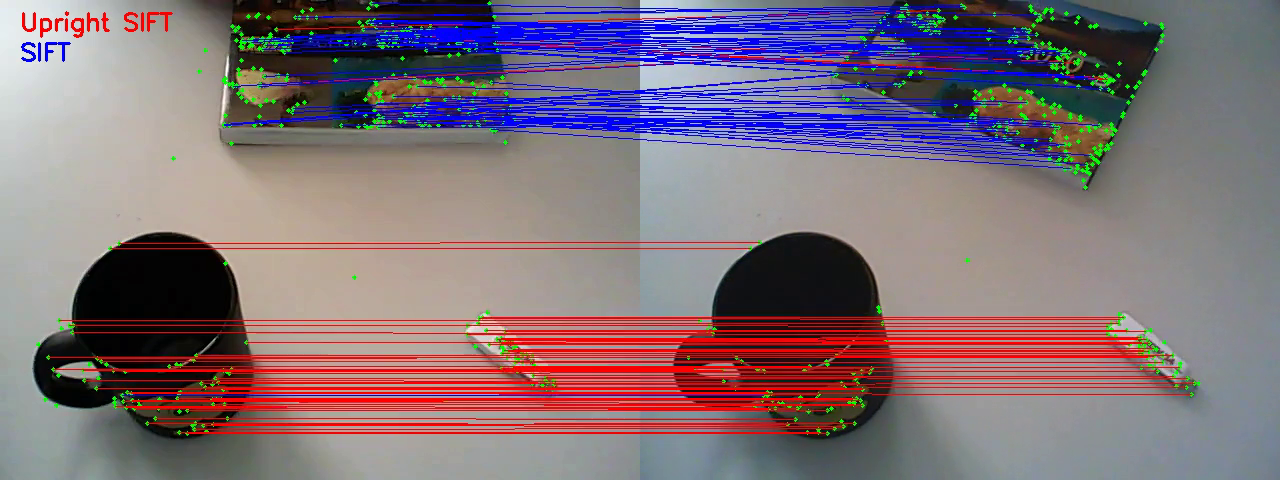
Rémi Pautrat, Viktor Larsson, Martin R. Oswald, Marc Pollefeys, European Conference on Computer Vision (ECCV), 2020 (Oral) project page / teaser / oral / code / arXiv A learned feature descriptor able to adapt its invariance to illumination and rotation at matching time. |
|
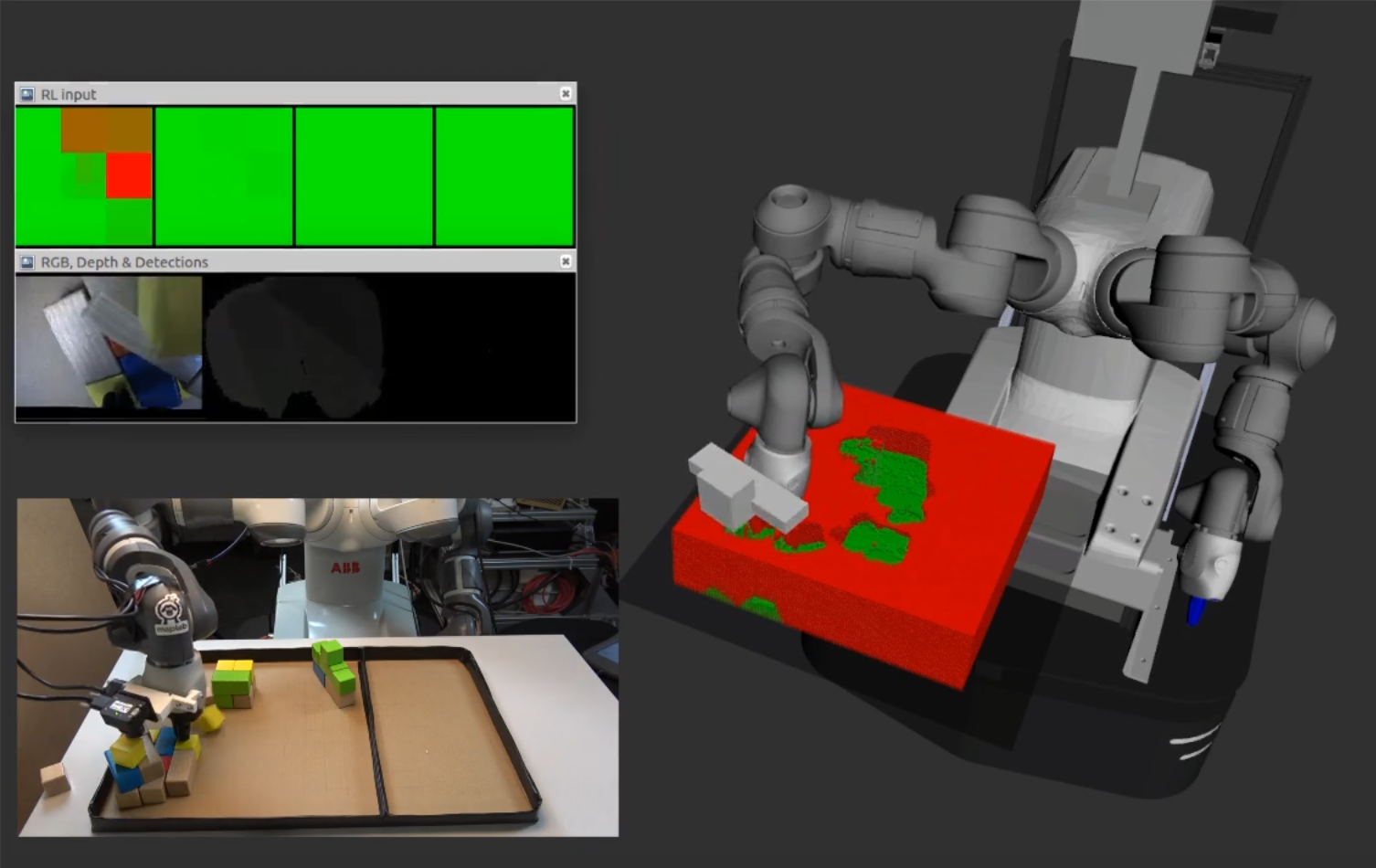
Tonci Novkovic*, Rémi Pautrat*, Fadri Furrer, Michel Breyer, Roland Siegwart, Juan Nieto, International Conference on Robotics and Automation (ICRA), 2020 project page / teaser / oral / arXiv We leverage reinforcement learning and computer vision to perform interactive perception: a robot manipulator has to find a hidden target object in a scene by interacting with its environment. |
|
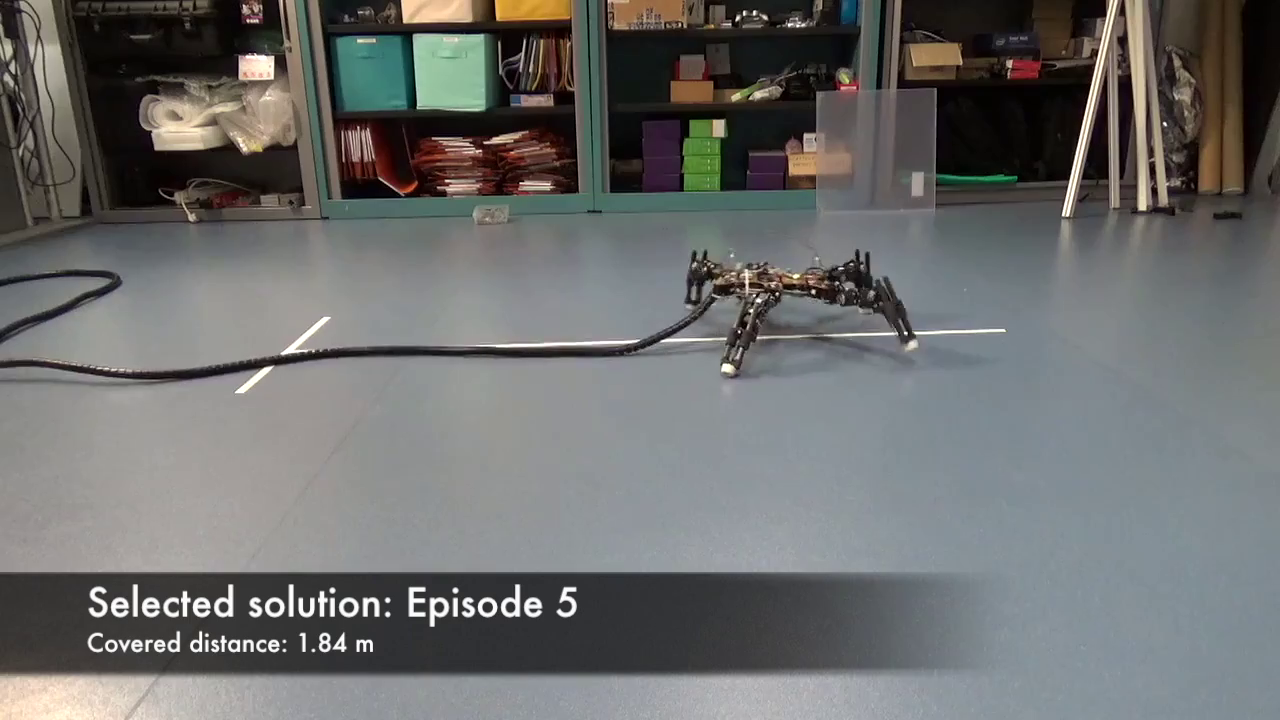
Rémi Pautrat, Konstantinos Chatzilygeroudis, Jean-Baptiste Mouret, International Conference on Robotics and Automation (ICRA), 2018 video / arXiv We propose a new acquisition function for Bayesian Optimization that combines the likelihood of prior information with the expected improvement. We apply it to the task of damage recovery in robotics and automatic adaptation to new environments. |
|
Template gratefully borrowed from Jon Barron's personal website. |