We propose a set of new solvers to extract the 3 orthogonal vanishing points of an uncalibrated image (i.e. unknown focal length), given a prior on the gravity direction. This work assumes a Manhattan world with 3 main directions x, y, z.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Code] |
[Paper] |
[Bibtex] |
|
|
|
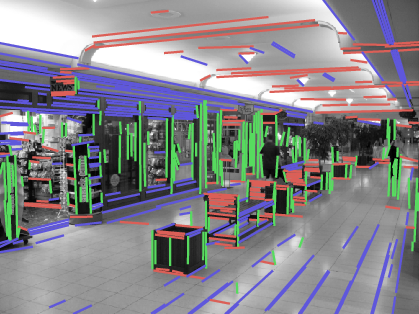
We propose a set of new solvers to extract the 3 orthogonal vanishing points of an uncalibrated image (i.e. unknown focal length), given a prior on the gravity direction. This work assumes a Manhattan world with 3 main directions x, y, z. |
We tackle the problem of estimating a Manhattan frame, i.e. three orthogonal vanishing points, and the unknown focal length of the camera, leveraging a prior vertical direction. The direction can come from an Inertial Measurement Unit that is a standard component of recent consumer devices, e.g., smartphones. We provide an exhaustive analysis of minimal line configurations and derive two new 2-line solvers, one of which does not suffer from singularities affecting existing solvers. Additionally, we design a new non-minimal method, running on an arbitrary number of lines, to boost the performance in local optimization. Combining all solvers in a hybrid robust estimator, our method achieves increased accuracy even with a rough prior. Experiments on synthetic and real-world datasets demonstrate the superior accuracy of our method compared to the state of the art, while having comparable runtimes. We further demonstrate the applicability of our solvers for relative rotation estimation.
|
Website template from Minyoung Huh and Richard Zhang. |